¿Cómo se hacen un selfie los rovers de Marte? El video del Perseverance de la NASA muestra cómo el rover capturó la histórica imagen de sí mismo del 6 de abril de 2021 junto al helicóptero Ingenuity. Además, el micrófono de entrada, descenso y aterrizaje del rover capturó el sonido de los motores del brazo zumbando durante el proceso.
Los selfies permiten a los ingenieros comprobar el desgaste del rover. Pero también inspiran a una nueva generación de entusiastas del espacio: muchos miembros del equipo del rover pueden citar una imagen favorita que despertó su interés por la NASA.
“Me metí en esto porque vi una imagen de Sojourner, el primer rover de la NASA en Marte”, dijo Vandi Verma, ingeniera jefe de operaciones robóticas de Perseverance en el Jet Propulsion Laboratory de la NASA en el sur de California. Verma trabajó para los rovers Opportunity y Curiosity de la agencia, y ayudó a crear el
primer selfie de Curiosity, tomado el 31 de octubre de 2012. “Cuando tomamos ese primer selfie, no nos dimos cuenta de que se convertirían en algo tan icónico y rutinario.”
El video de una de las cámaras de navegación de Perseverance muestra el brazo robótico del rover girando y maniobrando para tomar las 62 imágenes que componen el resultado. Lo que no capta es cuánto trabajo se requirió para hacer realidad este primer selfie. Aquí hay un vistazo más de cerca.
Trabajo en equipo
El selfie de Perseverance se unió con la ayuda de un grupo de aproximadamente una docena de personas, incluidos conductores de rover, ingenieros que realizaron pruebas en JPL e ingenieros de operaciones de cámara que desarrollaron la secuencia de la cámara, procesaron las imágenes y las unieron. Supuso alrededor de una semana trazar todos los comandos individuales requeridos.
Todos trabajaban en la “hora de Marte” (un día en el planeta rojo es 37 minutos más largo que en la Tierra), lo que significa estar despierto en medio de la noche y recuperar el sueño durante el día. Estos miembros del equipo a veces dejaban pasar ese sueño solo para hacer el selfie.
JPL trabajó con Malin Space Science Systems (MSSS) en San Diego, que construyó y opera la cámara responsable del selfie. La cámara llamada
WATSON, está principalmente diseñada para obtener tomas de primer plano de texturas de rocas, no imágenes de gran angular. Debido a que cada imagen de WATSON cubre solo una pequeña parte de un paisaje, los ingenieros tuvieron que ordenar al rover que tomara docenas de imágenes individuales para producir el selfie.
“Lo que más llamó la atención fue colocar Ingenuity en el lugar correcto en el selfie”, dijo Mike Ravine, Gerente de Proyectos Avanzados en MSSS. “Dado lo pequeño que es, pensé que hicimos un buen trabajo”.
Cuando se reciben las imágenes de Marte, los ingenieros de procesamiento de imágenes del MSSS comienzan su trabajo. Empiezan por limpiar las imperfecciones causadas por el polvo que se deposita en el detector de luz de la cámara. Luego, ensamblan los marcos de imágenes individuales en un mosaico y suavizan sus costuras usando un software. Finalmente, un ingeniero deforma y recorta el mosaico para que se parezca más a una foto de cámara normal al que el público está acostumbrado.
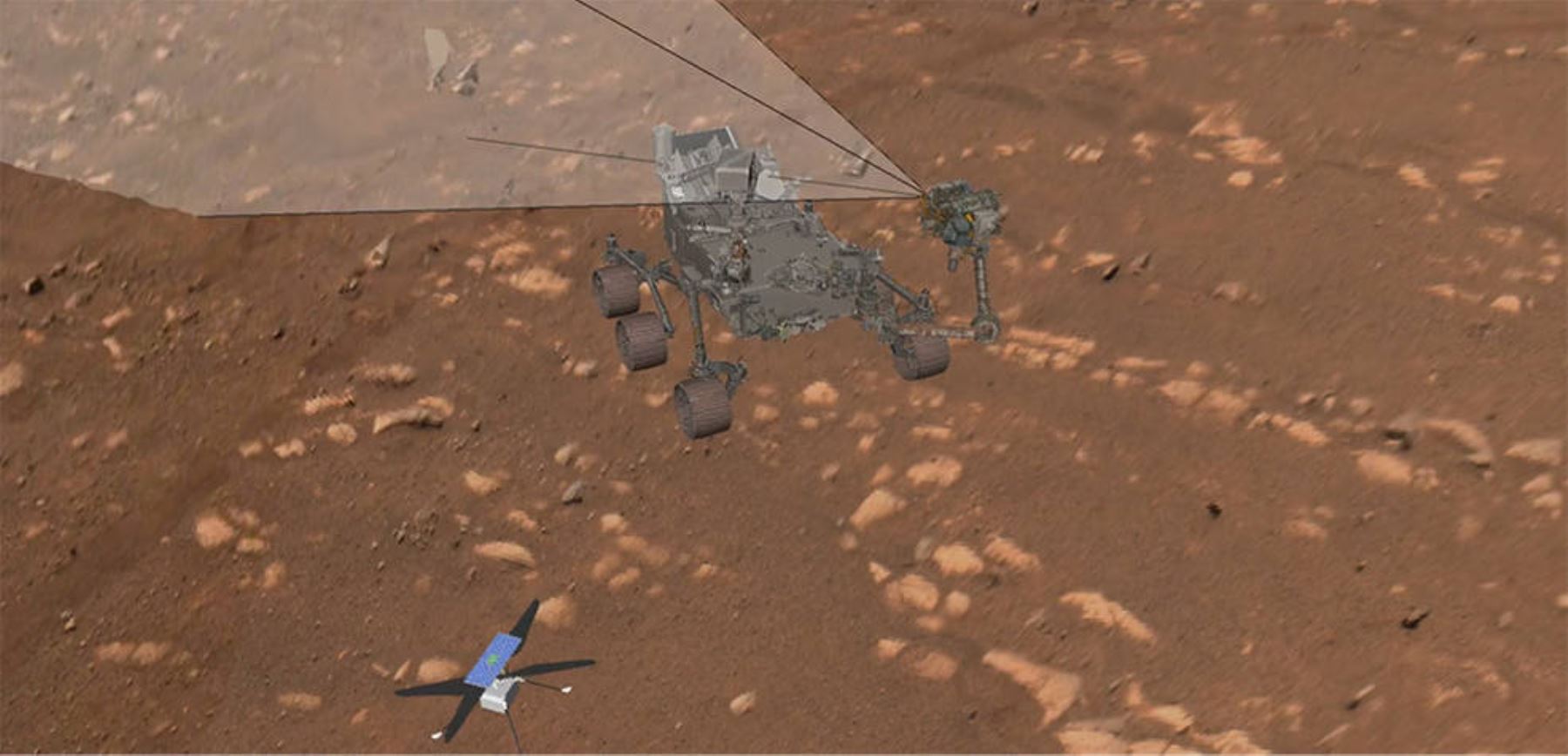
Esta simulación por ordenador muestra al rover Perseverance Mars de la NASA realizando su primer selfie, el 6 de abril de 2021. El punto de vista de la cámara WATSON del rover se incluye para mostrar cómo se tomaron cada una de las 62 imágenes antes de ser enviadas a la Tierra y unidas para formar el selfie. Créditos: NASA/JPL-Caltech.
Simulaciones por ordenador
Al igual que el rover Curiosity (este video en
blanco y negro de marzo de 2020 muestra cómo se hace un selfie), Perseverance tiene una torreta giratoria al final de su brazo robótico. Junto con otros instrumentos científicos, la torreta incluye la cámara WATSON, que permanece enfocada en el rover durante los selfies mientras se inclina para capturar una parte del entorno. El brazo actúa como un palo para selfies, quedando fuera del marco en el resultado final.
Hacer que Perseverance saque su palo de selfie es mucho más complejo que con Curiosity. La torreta de Curiosity mide 55 centímetros de ancho, la de Perseverance mide 75 centímetros de ancho. Es como mover algo del diámetro de la rueda de una bicicleta de carretera a pocos centímetros del mástil de Perseverance, la “cabeza” del rover.
JPL creó un software para garantizar que el brazo no chocara con el rover. Cada vez que se detectaba una colisión en las simulaciones en la Tierra, el equipo de ingeniería ajustaba la trayectoria del brazo; el proceso se repitió decenas de veces para confirmar que el movimiento del brazo era seguro. La secuencia del comando final acerca el brazo robótico “lo más cerca posible del cuerpo del rover sin tocarlo”, dijo Verma.
El sonido de los selfies
Junto con su micrófono de entrada, descenso y aterrizaje, Perseverance lleva un micrófono en su instrumento SuperCam. Los micrófonos suponen una novedad para la nave espacial de la NASA en Marte, y el audio promete ser una nueva herramienta importante para los ingenieros de rover en los años venideros. Entre otros usos, puede proporcionar detalles importantes sobre si algo está funcionando bien. En el pasado, los ingenieros solo escuchaban un rover de prueba en la Tierra.
“Es como tu coche: incluso si no eres mecánico, a veces escuchas un problema antes de darte cuenta de que algo anda mal”, dijo Verma.
Si bien no han escuchado nada preocupante hasta la fecha, los zumbidos de los motores suenan sorprendentemente musicales cuando reverberan a través del chasis del rover.
(FIN) NDP/MPM
Publicado: 30/6/2021